
iANPR 2.5.0
Содержание
3. Шаблоны номеров и правила их построения
4. Инсталляция и использование в Windows
5. Инсталляция и использование в Linux
Инсталляция на ARM микроПК с нуля
6.1. Тест изображения -i и –i2
6.2. Тест производительности одного изображения -p1
6.3. Тест производительности одного изображения с внутренним распараллеливанием -p1pc
6.4. Тест производительности одного изображения с разными объектами -p1o
6.5. Тест производительности 4-х изображений –p4
6.6. Тест производительности 4-х изображений с 4-мя объектами –-p4o
6.8. Тест видео с траекторией -vt
6.10. Результаты тестов GPU, CPU и ARM
9. Получение движков TensorRT из ONNX моделей
10. Рекомендации к использованию
1. Назначение и лицензии
Назначение: iANPR2 – это комплект средств разработки (SDK) для распознавания автомобильных номеров. Возможности библиотеки включают обработку изображений. Основной язык использования библиотеки – C/C++.
Связь с прошлой версией: Несмотря на то, что при разработке iANPR2 был учтен опыт iANPR версии 1.8, iANPR2 – совершенно новый продукт, в котором полностью с нуля написан код.
Технические требования: Текущая TRT версия работает только при наличии GPU ускорителя NVIDIA.
Версии CPU работают без видеокарты.
Лицензии: В настоящей версии нет разделения по странам. Предоставляется только лицензия с максимальными возможностями, допускающая распространение со своим продуктом
iANPR2 TRT WINDOWS
iANPR2 TRT LINUX
iANPR2 CPU WINDOWS
iANPR2 CPU LINUX
iANPR2 ARM FULL
Ценообразование представлено на сайте: https://intbusoft.com/iANPR2
2. Функции и структуры SDK
Все функции и структуры определяются в файле iANPR2.h.
Объект iANPR2Object
Объект является указателем типа void и определяется следующим образом:
typedef void* iANPR2Object;
В объекте iANPR2Object инициализируются режимы распознавания, загружаются конфигурационные файлы и шаблоны, движки TensorRT на видеокарту или модели на центральный процессор.
Объект iANPR2TrajectoryObject
Объект является указателем типа void и определяется следующим образом:
typedef void* iANPR2TrajectoryObject;
В объекте iANPR2TrajectoryObject хранятся и анализируются траектории номеров отдельно от объекта iANPR2Object.
Структура iANPR2Setting
Предназначена для настройки режимов распознавания и выдачи результатов
struct iANPR2Setting
{
float detectConfThresh = 0.25f;
int minPlateHeight = 12;
int minPlateWidth = 60;
std::vector<std::string> templateCountries;
bool parallelCPUfunc = false;
int memoryNumberFrames = 4;
int memoryNumberRepeat = 2;
int minSymbolsPlate = 6;
int maxSymbolsPlate = 15;
bool mem = false;
bool expandedResult = false;
};
detectConfThresh - пороговое значение детектирования номера (Рекомендуется 0.25) в интервале (0,1). Используется моделью, детектирующей автомобильный номер и другие объекты.
minPlateHeight - минимальная высота номера в пикселях, меньше которой номер отбрасывается. Рекомендуется 12.
minPlateWidth - минимальная ширина номера в пикселях, меньше которой номер отбрасывается. Рекомендуется 60.
templateCountries - шаблоны стран, задается вектором строк по типу шаблонов страны, определенного в файле шаблонов, например - {"ru"}.
parallelCPUfunc – включает распараллеливание части функций, выполняемых на CPU. Этот параметр имеет смысл включать только при batchSize > 1 и когда точно известно, что номеров в кадре обычно несколько. Так как распараллеливание работает только по номерам.
memoryNumberFrames - количество последних кадров, результаты распознавания которых хранятся в памяти для накапливаемого распознавания.
memoryNumberRepeat – количество повторений номера в памяти для накапливаемого распознавания.
minSymbolsPlate – минимальное количество символов в номере. Номера с меньшим количеством символов отбрасываются.
maxSymbolsPlate – максимальное количество символов в номере. Номера с большим количеством символов отбрасываются.
mem – Включает накапливаемое распознавание.
expandedResult – включить расширенное возвращение строки номера. В строки номера добавляются:
символ * - обозначает перенос строки в многострочных номеров;
символы [] – показывают зону региона.
Структура NumberResult
Предназначена для кадрового вывода результата распознавания – содержит в себе информацию о распознанном номере.
struct NumberResult
{
cv::Rect rect;
std::vector<std::string> strings;
std::vector<std::string> templates;
std::vector<float> confidence;
float score;
};
rect – область распознанного номера.
strings – вероятные номера. 0-ая строка в векторе – наиболее вероятный номер, последующие возможные номера для распознанной зоны убывают по вероятности.
templates – наименование шаблонов для каждой вероятной строки соответственно. Если шаблон не найден – то имя шаблона = none. Подробнее о шаблонах в пункте 3.
confidence – уверенность (достоверность) распознавания для каждого номера из вероятных соответственно. Не является точным показателем.
score – вероятность (confidence) при детектировании номера.
Структура ObjectResult
Предназначена для кадрового вывода дополнительных результатов распознавания (не номеров).
struct ObjectResult
{
cv::Rect rect;
float score;
int classId
int indexNum;
};
rect – область детектированного объекта.
score – вероятность (confidence) при детектировании объекта.
classId – метка объекта: 1 – человек, 2 – легковой автомобиль, 3 – мотоцикл, 4 – автобус, 5 – грузовой транспорт.
indexNum – индекс номера в последовательности возвращенных номеров для того же изображения, к которому относится этот объект. Принимает значение -1 в случае, если нет соответствующего номера.
Структура NumberResultMem
Предназначена для вывода накопительного результата распознавания.
struct NumberResultMem
{
std::string numberString;
std::string numberTemplate;
};
numberString – распознанный номер.
numberTemplate – шаблон номера.
Структура TrajectoryResult
Предназначена для вывода траектории движения номера.
struct TrajectoryResult
{
std::vector<PointTrajectory> points;
std::string strNumber;
std::string templateNumber;
unsigned long weights;
unsigned long ID;
};
points – вектор точек в следующем формате:
struct PointTrajectory
{
cv::Point point; // Точка в кадре (левый верхний край номера)
unsigned long weight;// Вес точки - сколько кадров в этой точке
long time; // Время кадра в миллисекундах от инициализации траектории
};
strNumber – результирующий номер для этой траектории.
templateNumber – шаблон для результирующего номера.
weights – общий вес траектории, который определяется, в скольких кадрах был распознан номер.
ID – идентификатор траектории.
Функция iANPR2Version
Возвращает строку с информацией о версии библиотеки.
extern "C" bool iANPR2Version(
char* outBuf,
int sizeBuf
);
Параметры:
outBuf – выходной буфера для строки версии;
sizeBuf – размер выходного буфера.
Возвращает 0 при успехе или код ошибки. Пример строки версии:
GPU - 2.5.0.0.GPUTensorRT
CPU - 2.5.0.0.CPU
Функция iANPR2Init
Инициализация объекта iANPR2.
extern "C" iANPR2Object iANPR2Init(
char* configFile,
char*license,
int* error
);
Параметры:
configFile – путь до конфигурационного файла, формат которого описан ниже.
license – строка лицензии.
error – код возвращаемой ошибки.
Возвращает объект iANPR2Object или NULL (в этом случае в error возвращается код ошибки).
Формат конфигурационного файла (JSON):
{
"versionconfig":2,
"detectionmodelpath": "data/20x/platedetectionyoloxf190923.engine",
"batchSize": 1,
"classificationmodelpath": "data/20x/classificationf07082023.engine",
"symbolsdetectmodelpath": "data/20x/symbolsmodelyoloxf090224.engine",
"templatesfile": "data/platetemplates.json"
}
versionconfig – версия формата конфигурационного файла, оставлять как есть для текущей версии iANPR.
detectionmodelpath – путь до TensorRT движка или модели детектирования.
batchSize – размер пактов модели детектирования (должно совпадать с движком детектирования).
classificationmodelpath - путь до TensorRT движка или модели классификации.
symbolsdetectmodelpath – путь до TensorRT движка или модели детектирования символов.
templatesfile – путь до файла шаблонов номеров.
Функция iANPR2Init2
Инициализация объекта iANPR2. Альтернатива функции iANPR2Init, в которой все параметры конфигурационного файла передаются через параметры.
extern "C" iANPR2Object iANPR2Init2(
char* detectionModelPath,
int batchSize,
char* symbolsDetectModelPath,
char* classificationModelPath,
char* plateTemplatesStringInJSON,
char* license,
int* error
);
Параметры:
detectionModelPath – – путь до TensorRT движка или модели детектирования.
batchSize – размер пактов модели детектирования (должно совпадать с движком детектирования).
symbolsDetectModelPath – путь до TensorRT движка или модели детектирования символов.
classificationModelPath - путь до TensorRT движка или модели классификации.
plateTemplatesStringInJSON – шаблоны номеров в JSON формате – прочитанный JSON файл шаблонов в буфер char*.
license – строка лицензии.
error – код возвращаемой ошибки.
Возвращает объект iANPR2Object или NULL (в этом случае в error возвращается код ошибки).
Функции iANPR2Release и iANPR2ReleaseP
Удаление iANPR2 объекта из памяти.
extern "C" void iANPR2Release(
iANPR2Object* object
);
extern "C" bool iANPR2ReleaseP(
iANPR2Object object
);
iANPR2Release принимает на вход указатель на объект, очищает его память и обнуляет object.
iANPR2ReleaseP принимает на вход объект, очищает его память и возвращает TRUE при успехе или FALSE, если объект пустой.
Функция iANPR2Settings
Установка настроек распознавания для объекта iANPR2.
extern "C" bool iANPR2Settings(
iANPR2Object object,
iANPR2Setting settings
);
Параметры:
object – объект iANPR2.
settings – заполненная структура iANPR2Setting.
Возвращает TRUE при успехе или FALSE, если объект пустой.
Функция iANPR2SettingsJSON
Установка настроек распознавания для объекта iANPR2 через строку в формате JSON.
extern "C" bool iANPR2SettingsJSON(
iANPR2Object object,
char* json
);
Параметры:
object – объект iANPR2.
json – char* строка в формате JSON. Пример такой строки в стиле Python ниже.
Возвращает TRUE при успехе или FALSE, если объект пустой или не удалось спарсить строку json. Пример строки в стиле Python:
settings = {
"detectConfThresh":0.25,
"minPlateHeight": 12,
"minPlateWidth": 60,
"templateCountries":[
"ru"
],
"parallelCPUfunc":0, # 0 or 1
"memoryNumberFrames":8,
"memoryNumberRepeat":4,
"minSymbolsPlate": 6,
"maxSymbolsPlate": 15,
"mem":param2, # 0 or 1
"expandedResult":1,# 0 or 1
}
Все параметры соответствуют структуре iANPR2Setting.
Функция anpr2PLate
Принимает изображение и выполняет распознавание автомобильных номеров.
extern "C" int anpr2PLate(
iANPR2Object object,
std::vector<cv::Mat> images
);
Параметры:
object – объект iANPR2.
images – вектор изображений cv::Mat в формате BGR 3 канала по 8 бит. Размер вектора соответствует batchSize в конфигурации инициализации объекта.
Возвращает 0 или код ошибки. Альтернативой этой функции является комбинация функций anpr2AddImage и anpr2inference.
Функция anpr2AddImage
Первая часть альтернативы anpr2PLate, предназначенная для таких языков программирования, как Python. Помещает изображение в буфер.
extern "C" int anpr2AddImage(
iANPR2Object object,
const char* image_bytes,
long size_image
);
Параметры:
object – объект iANPR2.
images_bytes - массив байт, представляющий формат BMP, JPEG, PNG или TIFF;
size_image - размер массива.
Возвращает 0 или код ошибки. Если batchSize > 1, то необходимо вызвать функцию batchSize раз, чтобы заполнить буфер.
Функция anpr2inference
Вторая часть альтернативы anpr2PLate, предназначенная для таких языков программирования, как Python. Распознает помещенные ранее изображение(-я) функцией anpr2AddImage во внутренний буфер.
extern "C" int anpr2inference(
iANPR2Object object
);
Параметры:
object – объект iANPR2.
Возвращает 0 или код ошибки.
Функция anpr2GetResult
Получить результат распознавания.
std::vector<std::vector<NumberResult>> anpr2GetResult(
iANPR2Object object
);
Параметры:
object – объект iANPR2.
Возвращает вектор векторов структуры NumberResult. Наружный вектор - разделяет результаты распознавания по изображениям (если оно одно, то его размер – 1). Внутренний вектор – распознанные номера в изображении.
Функция anpr2GetResultJSON
Получить результат распознавания в формате JSON.
extern "C" int anpr2GetResultJSON(
iANPR2Object object,
char* outBuf,
int sizeBuf
);
Параметры:
object – объект iANPR2.
outBuf – выходной буфера для JSON;
sizeBuf – размер выходного буфера.
Возвращает 0 при успехе или код ошибки. При успехе в буфер записывается результат распознавания а формате JSON. Пример результата для файла image2.jpg:
{
"images":[
[
{
"x":233,
"y":286,
"width":192,
"height":54,
"strings":[
"Y758CC56"
],
"templates":[
"base_1"
],
"zones":[
"ru"
],
"confidence":[
0.983965
],
"score":0.889966
}
]
]
}
Наименования соответствуют структуре NumberResult (кроме rect, который расписан отдельно).
Функция anpr2GetAddResult
Получить результат распознавания дополнительных объектов.
std::vector<std::vector<ObjectResult>> anpr2GetAddResult(
iANPR2Object object
);
Параметры:
object – объект iANPR2.
Возвращает вектор векторов структуры ObjectResult. Наружный вектор - разделяет результаты распознавания дополнительных объектов по изображениям (если оно одно, то его размер – 1). Внутренний вектор – распознанные дополнительные объекты в изображении.
Функция anpr2GetAddResultJSON
Получить результат распознавания дополнительных объектов в формате JSON.
extern "C" int anpr2GetAddResultJSON(
iANPR2Object object,
char* outBuf,
int sizeBuf
);
Параметры:
object – объект iANPR2.
outBuf – выходной буфера для JSON;
sizeBuf – размер выходного буфера.
Возвращает 0 при успехе или код ошибки. При успехе в буфер записывается результат распознавания а формате JSON. Пример результата для файла image2.jpg:
{
"images":[
[
{
"x":66,
"y":5,
"width":563,
"height":403,
"score":0.943103,
"classid":2,
"imagenum":0
}
]
]
}
Наименования соответствуют структуре ObjectResult (кроме rect, который расписан отдельно).
Функция anpr2GetResultMem
Получить результат распознавания из суммирования в памяти.
std::vector<std::vector<NumberResultMem>> anpr2GetResultMem(
iANPR2Object object
);
Параметры:
object – объект iANPR2.
Возвращает вектор векторов структуры NumberResultMem. Наружный вектор - разделяет результаты распознавания по изображениям (если оно одно, то его размер – 1). Внутренний вектор – распознанные номера в изображении.
Функция anpr2GetResultMemJSON
Получить результат распознавания из суммирования в памяти в формате JSON.
extern "C" int anpr2GetResultMemJSON(
iANPR2Object object,
char* outBuf,
int sizeBuf
);
Параметры:
object – объект iANPR2.
outBuf – выходной буфера для JSON;
sizeBuf – размер выходного буфера.
Возвращает 0 при успехе или код ошибки. При успехе в буфер записывается результат распознавания а формате JSON. Пример результата:
{
"numbers":[
[
{
"string":"A222AA02",
"template":"base_1",
"zone":"ru"
}
]
]
}
Функция iANPR2Trajectory
Создает объект iANPR2TrajectoryObject для хранения и анализа траектории. Один объект соответствует одному видеопотоку – последовательности кадров с одной камеры или видеофайла.
extern "C" iANPR2TrajectoryObject iANPR2Trajectory(
int widthImage,
int heightImage,
int tLimitTime,
int tLimitFrames,
int typeSpeed
);
Параметры:
widthImage – ширина изображения видеопотока.
heightImage – высота изображения видеопотока.
tLimitTime – время до устаревания (в миллисекундах), например 10000.
tLimitFrames – количество кадров до устаревания, например 100.
typeSpeed – тип при вычислении скорости. 0 - по времени, 1 - по кадру.
Возвращает объект iANPR2TrajectoryObject.
Функция iANPR2TrajectoryRelease
Уничтожает объект iANPR2TrajectoryObject.
extern "C" bool iANPR2TrajectoryRelease(
iANPR2TrajectoryObject object
);
Принимает на вход объект, очищает его память и возвращает TRUE при успехе или FALSE, если объект пустой.
Функция iANPR2TrajectoryProcess
Добавление результата распознавания кадра в траекторию.
bool iANPR2TrajectoryProcess(
iANPR2TrajectoryObject object,
std::vector<NumberResult> numbers,
std::vector<ObjectResult> objects
);
Параметры:
object – объект iANPR2TrajectoryObject.
numbers – распознанные номера для одного изображения.
objects – распознанные дополнительные объекты для одного изображения.
Функция iANPR2TrajectoryProcessJSON
Добавление результата распознавания кадра в траекторию с помощью строки JSON.
extern "C" bool iANPR2TrajectoryProcessJSON(
iANPR2TrajectoryObject object,
char* jsonNumbers,
char* jsonObjects
);
Параметры:
object – объект iANPR2TrajectoryObject.
jsonNumbers – распознанные номера в формате JSON, возвращенные anpr2GetResultJSON.
jsonObjects – распознанные дополнительные объекты в формате JSON, возвращенные anpr2GetAddResultJSON.
Возвращает TRUE при успехе или FALSE, если объект пустой или невозможно прочитать JSON строку.
Функция iANPR2TrajectoryGetResult
Получить текущие траектории из объекта траекторий iANPR2TrajectoryObject.
std::vector<TrajectoryResult> iANPR2TrajectoryGetResult(
iANPR2TrajectoryObject object
);
Параметры:
object – объект iANPR2TrajectoryObject.
Возвращает вектор траекторий Структура TrajectoryResult.
Функция iANPR2TrajectoryGetResultJSON
Получить текущие траектории из объекта траекторий iANPR2TrajectoryObject в формате JSON.
extern "C" int iANPR2TrajectoryGetResultJSON(
iANPR2TrajectoryObject object,
char* outBuf,
int sizeBuf
);
Параметры:
object – объект iANPR2TrajectoryObject.
outBuf – выходной буфера для JSON;
sizeBuf – размер выходного буфера.
Возвращает 0 при успехе или код ошибки. При успехе в буфер записывается результат распознавания а формате JSON. Пример результата:
{
"trajectories":[
{
"points":[
[2298,1596,1,147],[2298,1596,6,1096],[2298,1606,2,1410],[2316,1620,1,1571],[2334,1630,1,1739],[2328,1640,1,1901],[2346,1650,1,2073],[2346,1660,1,-2061],[2352,1667,1,-1903],[2376,1677,1,-1750],[2388,1684,1,-1595],[2394,1694,2,-1285],[2406,1707,1,-1129],[2424,1717,1,-966],[2430,1721,1,-806],[2436,1728,1,-635],[2448,1741,1,-476],[2472,1755,1,-322],[2472,1768,1,-171],[2484,1778,1,-14],[2502,1798,1,145],[2520,1812,1,298],[2532,1825,1,459],[2538,1836,1,624],[2556,1852,1,791],[2568,1869,1,961],[2574,1879,1,1128],[2592,1893,1,1293],[2604,1910,1,1452],[2622,1927,1,1614],[2640,1940,1,1780],[2652,1957,1,1976],[2664,1971,1,-2146],[2682,1987,1,-1943],[2694,2008,1,-1774],[2718,2028,1,-1598],[2736,2041,1,-1429],[2754,2065,1,-1249],[2778,2085,1,-1074],[2790,2109,1,-903]],"strNumber":"LM07MK0","templateNumber":"none","weights":47,"ID":0},{"points":[[1368,1866,1,-733],[1362,1866,1,-567],[1362,1863,2,-226],[1362,1859,1,-45],[1362,1859,1,142],[1362,1856,1,324],[1362,1856,3,860]],"strNumber":"0F56WAA","templateNumber":"none","weights":10,"ID":1}]}
Формат points:
[x,y,weight,time]
3. Шаблоны номеров и правила их построения
Предназначение шаблонов:
· определить, что в номере: буква O или цифра 0 (ноль), т.к. при классификации эти символы не отличаются;
· определение шаблона, говорит о большей вероятности этого номера, чем номер без шаблона;
· немного повысить достоверность распознавания за счет выбрасывания недопустимых символов.
Сейчас в стандартном файле шаблонов platetemplates.json описаны шаблоны следующих стран:
· Российская Федерация (ru).
· Азербайджан (az).
· Армения (am).
· Республика Беларусь (by).
· Казахстан (kz).
· Кыргызстан (kg).
· Таджикистан (tj).
· Узбекистан (uz).
Однако распознавание работает и без шаблонов, но в этом случае всегда будет выдаваться цифра 0 (буквы O никогда не будет).
Файл шаблонов в формате JSON достаточно прост и можно дополнить его для номеров другой страны самостоятельно.
ВНИМАНИЕ: В шаблонах используйте только буквы латинского алфавита.
При этом на настоящий момент алфавит классификации следующий:
0123456789ABCDEFGHIJKLMNPQRSTUVWXYZ
ВНИМАНИЕ: Помимо этих символов в распознавании могут выдаваться символы #(знак, что обнаружен иероглиф) и ?(символ не определен).
versiontemplates
versiontemplates определяет версию формата шаблона, нужно оставлять подходящую для текущей версии iANPR.
description
description – информационный блок, не влияет на распознавание.
zones
zones определяет зоны распознавания, в перспективе их можно указывать несколько при распознавании и тогда по всем зонам будет осуществляться попытка соответствия шаблону.
"zones": [
"ru"
],
Для каждой зоны обязательны ключи в JSON файле:
«Имя зоны», например "ru"
«Имя зоныtree», например "rutree"
Имя зоныtree
В «Имя зоныtree» представлена иерархия шаблонов номеров этой страны, верхним разделением является разделение по отношению яркости символа к фону:
"base" – символы темные на светлом фоне;
"inverted" – символы светлые на темном фоне.
Цвета номеров, такие как красный, синий и т.п. пока не используются. Номер обрабатывается в градациях серого. Вторым разделением является разделение на однострочные и двустрочные номера:
"lines1";
"lines2".
Далее перечислены имена шаблонов.
Имя зоны
В ключе «Имя зоны» перечислены описания для всех имен данной зоны, описанных в «Имя зоныtree». Например, описание шаблона base_1A:
}
"name": "base_1A",
"alphabet": "rubase",
"lines": 2,
"struct": "A000*AA|100",
"alignment": "DDDD*DD|UUU",
"mandatory": "####*##|###",
"height": "1111*11|222",
"heights": [ 0.927, 0.707 ],
"Block2Size": 0.44,
"type_left_sign": -1,
"prob": 0.5
}
Здесь:
name – имя шаблона.
alphabet – имя алфавита (см. про алфавит ниже).
lines – количество строк номера (1 или 2).
struct – структура номера. A – обозначает местоположение буквы; 0 – местоположение цифры; 1 – местоположение цифры, которой может и не быть;* - разделение строк номера; | - указывает на отделение блока (региона) от текущего расположения вправо до конца строки, ] - указывает на отделение блока (региона) от текущего расположения влево до начала строки. Пример с регионом ]:
"struct": "000*00]AAA",
order – необязательная строка - порядок возвращаемых символов. По умолчанию порядок последовательный и эта строка не нужна. Однако, например для двухстрочных номеров Казахстана это необходимо. В случае, если добавляется строка order, то в ней сохраняется структура * и |, и ] аналогично struct. На месте символов, которые остаются последовательными в возвращении – символ 0. На месте перемещаемых вправо 1, 2 и т.п.. Пример, который переносит первые два символа второй строки вправо:
"order": "000*12]000",
alignment – выравнивание. D – символы выравниваются по нижней границе символа; U – символы выравниваются по верхней границе символа, * и |, и ] аналогично struct.
mandatory – обязательность символа. # - символ может быть любой из алфавита, соответствующему цифре или символу в struct; * и |, и ] аналогично struct. Если символы заданы жестко, как например в шаблоне "diplomat_9", то эта секция будет выглядеть так: "mandatory": "###CD#|##", где С и D – конкретные обязательные символы из алфавита.
height – соответствие символа номеру шаблона в heights (нумерация с 1, а не с 0). * и | аналогично struct.
heights – высоты символов относительно высоты самого номера.
widthsize – необязательный блок, предназначен для лучшего отнесения к шаблонам при похожих по структуре номерах. Например, uzbase2_2008_org и uztrailer2_2008 отличаются только тем, что последний символ в верхней строке у одного буква, а у другого шаблона – цифра. И естественно они могут быть цифра 0 или буква О. Но поскольку расстояние между символами отличается, то можно добавить этот блок для точного отнесения к шаблону. В этом случае 0 – означает не учитывать символ (обязательно для левых символов), 1 и 2 – разные расстояния до предыдущего символа, относительные расстояния в widthsizes.
widthsizes – заданные относительные расстояния между символами. Относительные, означает, что они относительны друг друга. Так [ 10, 20 ] – означает расстояние 1 и 2.
Block2Size – максимальный размер второй секции (региона). Пока не используется.
type_left_sign – есть ли в номере слева информация о стране. -1 - не используется. 1 – используется номеров, где слева название страны ограничено блоком, напоминающем символ I. Пока используется только для однострочных номеров Армении:
prob – вероятность шаблона номера. Пока не используется.
usefeatures
usefeatures – показывает использовать ли особенности номера при отнесении к зоне. 0 – не использовать, 1 – использовать.
zonesfeatures
zonesfeatures – содержит разбитые особенности по странам. На текущий момент есть такие особенности:
|
Название особенности |
Картинка особенности |
|
feat_ru |
|
|
feat_am |
|
|
feat_ams |
|
|
feat_az |
|
|
feat_by |
|
|
feat_kg |
|
|
feat_kz |
|
|
feat_tj |
|
|
feat_uz |
|
|
feat_blue |
|







Особенности используются как необязательный признак. Т.е. если какая-то особенность найдена, то этот номер принадлежит именно этой стране. Но если не найдена никакая особенность, то перебираются шаблоны всех стран. Добавлять свои особенности нельзя – они прописаны в модели обучения.
alphabets
В ключе "alphabets" перечислены названия алфавитов, которые могут быть использованы в шаблонах.
alphabetsinfo
В ключе "alphabetsinfo" – алфавиты для этих названий, при этом алфавит применим только для латинских символов из полного набора классификации, а символы цифр не задаются никогда, т.к. считаются, что они всегда используются.
ВНИМАНИЕ: При использовании шаблонов можно столкнуться с ситуацией, когда номера других стран пытаются подстроится под шаблоны, например буква A заменяется на 4, буква B заменяется на 8 и т.п. Способов решения 2: 1) расширить шаблоны под все встречающиеся номера 2) использовать дополнительно второй необработанный результат распознавания, который обязательно возвращается в таком случае.
ВНИМАНИЕ: Не все номера, поставляемые в шаблоне нужно использовать. Например, система распознавания находится в России, но могут заезжать, например, номера из Казахстана. В этом случае в kztree можно удалить все шаблоны номеров, которые принципиально не могут появиться в России. Например, очевидно, что номера полиции Казахстана не могут встречаться в России, а вот номер грузовиков – вполне.
4. Инсталляция и использование в Windows
Весь необходимый для тестового запуска набор библиотек (кроме распространяемого пакета Visual Studio) находится в папке minrun. Там можно проверить работу утилиты.
Инсталляция для версии TRT
Если необходимо не только запускать, но и конвертировать из ONNX моделей в движки TensorRT, то нужно установить все пакеты.
Необходимые пакеты и ссылки на них (ссылки с течением времени могут меняться)
1. Visual Studio 2019 redist (распространяемый пакет):
https://aka.ms/vs/17/release/vc_redist.x64.exe
2. OpenCV 4.7:
https://github.com/opencv/opencv/releases/download/4.7.0/opencv-4.7.0-windows.exe
3. CUDA 11.7:
4. cuDNN 8.0(Вы должны согласиться с лицензией): https://developer.nvidia.com/compute/machine-learning/cudnn/secure/8.0.5/11.1_20201106/cudnn-11.1-windows-x64-v8.0.5.39.zip
5. TensorRT 8.5.3.1 (Вы должны согласиться с лицензией):
Все пакеты, кроме Visual studio, находятся в папке packages.
Инсталляция для CPU
Не требуется. Используется пакет OpenCV 4.7 (см. выше) и OpenVINO 2024.2.0:
https://storage.openvinotoolkit.org/repositories/openvino/packages/2024.2/
Присоединение библиотеки к проекту C++:
необходимо подключение opencv_world470.lib и ianpr2.lib.
5. Инсталляция и использование в Linux
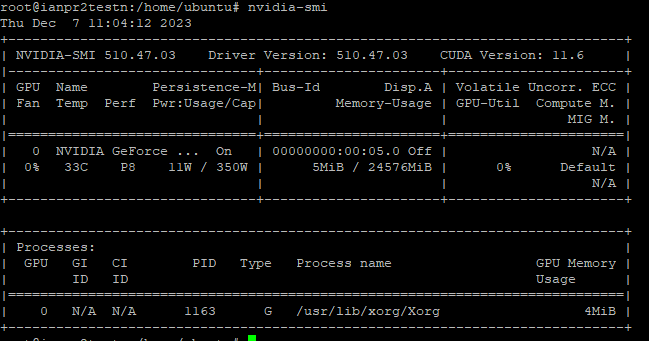
Инсталляция TRT версии
Пример инсталляции для Ubuntu 20.04.3 с установленным уже драйвером nvidia-driver-510, CUDA 11.6, libcudnn8 и libcudnn8-dev. Версия C++ компилятора: g++ 9.3.0. Для новых видеокарт, например 4090, нужен драйвер nvidia-driver-535 и CUDA 11.8.
Шаг 1. Компиляция и установка OpenCV (необязателен, если вы просто скопируете нужные so файлы и include из релиза iANPR2).
Процесс компиляции без FFMPEG описан здесь: https://docs.opencv.org/4.x/d7/d9f/tutorial_linux_install.html
# Install minimal prerequisites
sudo apt update && sudo apt install -y cmake g++ wget unzip
# Download and unpack sources
wget -O opencv.zip https://github.com/opencv/opencv/archive/4.7.0.zip
unzip opencv.zip
# Create build directory
mkdir -p build && cd build
# Configure
cmake -DBUILD_opencv_world=ON ../opencv-4.7.0
# Build
cmake --build .
При простом копировании из релиза нужно скопировать so файлы в папку /usr/local/lib:
cp /home/ubuntu/ianpr2/opencvso/libopencv_world* /usr/local/lib
Шаг 2. Установка TensorRT
Процесс установки описан здесь: https://docs.nvidia.com/deeplearning/tensorrt/install-guide/index.html
Пакет для установки находится тут:
Закачиваем этот пакет. Через командную строку это может быть не удастся сделать, тогда можно воспользоваться пакетом с Яндекс диска, который идет в инсталляции, в этом случае можно будет скачать его так:
sudo apt install python3-pip
pip3 install wldhx.yadisk-direct
curl -L $(yadisk-direct Ссылка_с_яндекс_диска) -o nv-tensorrt-local-repo-ubuntu2004-8.5.3-cuda-11.8_1.0-1_amd64.deb
или так
curl -L $(/home/ubuntu/.local/bin/yadisk-direct Ссылка_с_яндекс_диска) -o nv-tensorrt-local-repo-ubuntu2004-8.5.3-cuda-11.8_1.0-1_amd64.deb
В результате у вас должен появиться файл:
nv-tensorrt-local-repo-ubuntu2004-8.5.3-cuda-11.8_1.0-1_amd64.deb
Далее добавляем этот пакет в видимый:
os="ubuntu2004"
tag="8.5.3-cuda-11.8"
sudo dpkg -i nv-tensorrt-local-repo-${os}-${tag}_1.0-1_amd64.deb
sudo cp /var/nv-tensorrt-local-repo-${os}-${tag}/*-keyring.gpg /usr/share/keyrings/
sudo apt-get update
И инсталлируем его:
sudo apt-get install tensorrt
Шаг 3. Установка iANPR 2
Загрузите файл ianpr2.zip в корень домашнего каталога (у нас это /home/ubuntu). И разархивируйте:
unzip ianpr2.zip
Откомпилируйте пример C++:
cd ianpr2/testutils/testutil
make
Файл testutil должен создаться в папке /home/ubuntu/ianpr2/bin
Скопируйте файл lic2.key с лицензией в туже папку.
Теперь остались только движки TensorRT, которые можно или получить из ONNX моделей или скопировать готовые в папку /home/ubuntu/ianpr2/bin/data/card
Проверьте работоспособность, запустив пример:
./testutil -i ianpr2dataconfig.json image2.jpg
Последняя строка вывода примера должна быть такая:
Y758CC56
Для запуска примера на Python, предварительно установите пакет OpenCV для Python:
pip install opencv-python
После чего:
python3 ianpr2testL.py
Должен быть такой результат:
INFO:root:Object iANPR2 loaded
INFO:root:iANPR2Settings installed
INFO:root:Image added
INFO:root:Inference true
{"images":[[{"x":233,"y":286,"width":192,"height":54,"strings":["Y758CC56"],"templates":["base_1"],"confidence":[0.983901],"score":0.889448}]]}
INFO:root:Object iANPR2 deleted
Инсталляция CPU версии
Шаг 1.
Такой же, как для TRT версии.
Шаг 2. Установка OpenVINO
Ссылка на документацию установки:
https://docs.openvino.ai/2024/get-started/install-openvino/install-openvino-archive-linux.html
Используйте версию 2024.2.0. Для Ubuntu 20 – это:
curl https://storage.openvinotoolkit.org/repositories/openvino/packages/2024.2/linux/l_openvino_toolkit_ubuntu20_2024.2.0.15519.5c0f38f83f6_x86_64.tgz --output openvino_2024.2.0.tgz
Распакуйте в /opt/intel/
tar -xf openvino_2024.2.0.tgz
sudo mv l_openvino_toolkit_ubuntu20_2024.2.0.15519.5c0f38f83f6_x86_64 /opt/intel/openvino_2024.2.0
Установите дополнительные требования:
cd /opt/intel/openvino_2024.2.0
sudo -E ./install_dependencies/install_openvino_dependencies.sh
Установка ссылки для простоты:
cd /opt/intel
sudo ln -s openvino_2024.2.0 openvino_2024
Конфигурация окружения:
source /opt/intel/openvino_2024/setupvars.sh
Шаг 3.
Такой же, как для TRT версии.
Инсталляция на ARM микроПК с нуля
Использовалось два тестовых устройства:
Orange Pi 3 LTS
Orange Pi 5B
Использовалась операционная система Armbian:
Orange Pi 3 LTS: https://stpete-mirror.armbian.com/archive/orangepi3-lts/archive/Armbian_23.8.3_Orangepi3-lts_jammy_current_6.1.53_minimal.img.xz
Orange Pi 5B: https://dl.armbian.com/orangepi5/archive/Armbian_24.2.1_Orangepi5_jammy_legacy_5.10.160_xfce-amazingfated_desktop.img.xz
Шаг 1. Образ заливается на SD-карту.
Это можно сделать, например, с помощью Rufus:
Для работы с WI-FI в Orange Pi 5B нужно добавить строку в файл /boot/armbianEnv.txt:
overlays=orangepi-5-ap6275p
Шаг 2. Устанавливаем минимальные пакеты
sudo apt update
sudo apt install -y cmake g++ wget unzip
sudo apt install build-essential
Шаг 3. Установка OpenVINO
Качаем OpenVINO и устанавливаем:
Распакуйте в /opt/intel/
Установите дополнительные требования:
cd /opt/intel/openvino_2023.3.0
sudo -E ./install_dependencies/install_openvino_dependencies.sh
Установка ссылки для простоты:
cd /opt/intel
sudo ln -s openvino_2023.3.0 openvino_2023
Конфигурация окружения:
source /opt/intel/openvino_2023/setupvars.sh
Шаг 4. Установка OpenCV
Можно как раньше, или просто скопируйте libopencv_world.so.4.7.0 в /usr/local/lib и сделайте на него ссылку
sudo ln –s libopencv_world.so.4.7.0 libopencv_world.so
Затем ldconfig
Установка в Astra Linux 1.7
В целом работа под Astra Linux не отличается от Linux версии. Однако необходимо самостоятельно откомпилировать OpenVINO или при возможности просто скопировать из релиза so файлы библиотеки.
Установка OpenVINO
Клонирование репозитория:
git clone -b releases/2023/3 --single-branch https://github.com/openvinotoolkit/openvino.git
Установка дополнительных модулей:
cd openvino
git submodule update --init --recursive
Подготовка папки для сборки:
mkdir build && cd build
Подготовка к сборке:
/usr/local/bin/cmake -DCMAKE_BUILD_TYPE=Release ..
Сборка:
/usr/local/bin/cmake --build .
Установка:
sudo make install
Посмотреть куда установились so файлы. Могут быть тут:
/usr/local/runtime/lib/intel64
Прописываем этот путь в какой-либо файл в /etc/ld.so.conf с набираем:
ldconfig
6. Примеры C++
Все примеры работы находятся в одном файле ianpr2test.cpp. Информацию о возможностях примера можно получить запустив без параметров ianpr2test.exe (Windows) или testutil (Linux). Будет выдана информация:
(C) 2023. IntBuSoft. ianpr2test - test util for iANPR2
Modes:
-i - one image test: ianpr2test -i <path config> <path to image> [-w]
-i2 - one image test with objects and extended result: ianpr2test -i2 <path config> <path to image>
-v - video test: ianpr2test -v <path to video>
-vt - video trajectory test: ianpr2test -v <path to video>
-p1 - performance 1 batch test: ianpr2test -p1 <path config>
-p1pc - performance 1 batch test with dll CPU parallel: ianpr2test -p1pc <path config>
-p1o - performance 1 batch test with object parallel: ianpr2test -p1o <path config>
-p4 - performance 4 batch test: ianpr2test -p4 <path config>
-p4pc - performance 4 batch test with dll CPU parallel: ianpr2test -p4pc <path config>
-p4o - performance 4 batch test with object parallel: ianpr2test -p4o <path config>
-d - directory of images test: ianpr2test -d <path config> <path to directory> <path to output directory>
6.1. Тест изображения –i и -i2
Вызывает функцию test1Image(). На основе этого примера покажем, как происходит работа с iANPR2.
Процесс инициализации iANPR2:
// Инициализация iANPR2
int error;
iANPR2Object ia2 = iANPR2Init((char*)cfgname, license,&error);
Здесь cfgname имя с путем до конфигурационного файла, формата описанного тут. license – это текст лицензии, для примера он загружается из lic2.key таким образом:
string lic;
char* license;
ifstream in("lic2.key");
if (!in.is_open())
{
cout << "Cann't find lic2.key file!:\n";
return 0;
}
getline(in, lic);
in.close();
license = (char*)lic.c_str();
В error же будут возвращаться ошибки или 0, если ошибок нет. Проверка безошибочности инициализации:
if (ia2 == NULL || error != int(IANPR2::iANPR2Errors::IA_OK))
{
std::cout << "Cann't init iANPR2Object! Error = " << error << " \n";
return;
}
После этого нужно установить настройки распознавания (необязательно менять все, т.к. они определен по умолчанию в iANPR2.h
iANPR2Setting settings{ 0.25, 12, 60,{"ru"},parallelDll };
iANPR2Settings(ia2, settings);
Изображения формируются в вектор, даже если оно всего одно. Размер вектора зависит от batchSize, определенный при инициализации.
std::vector <cv::Mat> imgs;
imgs.push_back(cv::imread(name));
После этого изображение(-я) в векторе передаются на распознавание:
int result = anpr2PLate(ia2, imgs);
if (result != int(IANPR2::iANPR2Errors::IA_OK))
std::cout << "Inference problem! Error = " << result << " \n";
Результаты распознавания получаются следующим образом:
vector<vector<NumberResult>> numbers = anpr2GetResult(ia2);
Ну и в конце работы происходит освобождение объекта iANPR2:
iANPR2Release(&ia2);
Запуск –i2 реализован в test1ImageFull и отличается установкой расширенной выдачи результата:
settings.expandedResult = true;
А также получением дополнительных объектов:
vector<vector<ObjectResult>> objects = anpr2GetAddResult(ia2);
6.2. Тест производительности одного изображения -p1
Данный тест запускает несколько раз распознавание изображения image2.jpg и высчитывает на каждом тесте среднее время. Пример теста на Windows 10 конфигурация i7-6700K 4.0ГГц 4 ядра и RTX 2080 Super:
TRT
D:\ianpr2\ianpr2CPP\bin>ianpr2test.exe -p1 ianpr2dataconfig.json
[Test0=0.00982]
[Test1=0.00915]
[Test2=0.00901]
[Test3=0.00897]
[Test4=0.00900]
[Test5=0.00895]
[Test6=0.00893]
[Test7=0.00886]
[Test8=0.00892]
[Test9=0.00891]
CPU (small)
[Test0=0.02823]
[Test1=0.02810]
[Test2=0.02841]
[Test3=0.02902]
[Test4=0.02871]
[Test5=0.02814]
[Test6=0.02851]
[Test7=0.02845]
[Test8=0.02843]
[Test9=0.02826]
Y758CC56
Для CPU все остальные тесты не имеют смысла, т.к. максимальное быстродействие в таком режиме.
6.3. Тест производительности одного изображения с внутренним распараллеливанием -p1pc
Не рекомендуется в текущей версии.
Данный тест запускает несколько раз распознавание изображения image2.jpg и высчитывает на каждом тесте среднее время. Часть внутреннего распознавания сделана на CPU, которое можно распараллелить. Однако это может быть эффективно только при большом batchSize и многих номерах в кадре. Поэтому режим не рекомендуется к использованию, т.к. может даже быть хуже в производительности: Пример теста на Windows 10 конфигурация i7-6700K 4.0ГГц RTX 2080 Super:
D:\ianpr2\ianpr2CPP\bin>ianpr2test.exe -p1pc ianpr2dataconfig.json
6.4. Тест производительности одного изображения с разными объектами -p1o
Распознавание производится не только на GPU, но и частично на CPU. Т.е. это классическая схема – распараллеливание на GPU, потом один поток, затем опять распараллеливание на GPU, затем один поток. С учетом этого и того, что доступ к GPU асинхронный, то оптимальным использованием библиотеки будет создание нескольких объектов в памяти, пример функции performanceTest1ImageP:
int error;
iANPR2Object ia2[4];
const int objects = 4;
for (int i = 0; i < objects; i++)
{
ia2[i] = iANPR2Init((char*)cfgname, license, &error);
if (ia2[i] == NULL || error != int(IANPR2::iANPR2Errors::IA_OK))
{
std::cout << "Cann't init iANPR2Object! Error = " << error << " \n";
return;
}
}
Далее можно создать 4 программных потока, которые будут наполняться изображениями. В примере тестируется одно изображение и используется async для распараллеливания:
std::vector <cv::Mat> imgs;
imgs.push_back(cv::imread("image2.jpg"));
for (int i = 0; i < countTests; i++)
{
auto t1 = std::chrono::high_resolution_clock::now();
for (int j = 0; j < countRepeat; j++)
{
std::future<int> a[objects];
for (int k = 0; k < objects; k++)
a[k] = std::async(std::launch::async, anpr2PLate, ia2[k], imgs);
for (int k = 0; k < objects; k++)
a[k].wait();
for (int k = 0; k < objects; k++)
if (a[k].get() != int(IANPR2::iANPR2Errors::IA_OK))
std::cout << "Inference problem! Error = " << a[k].get() << " \n";
}
}
Пример теста на Windows 10 конфигурация i7-6700K 4.0ГГц RTX 2080 Super:
D:\ianpr2\ianpr2CPP\bin>ianpr2test.exe -p1o ianpr2dataconfig.json
[run=0.00565]
[run=0.00491]
[run=0.00491]
[run=0.00507]
[run=0.00500]
[run=0.00502]
[run=0.00499]
[run=0.00492]
[run=0.00492]
[run=0.00494]
Y758CC56
6.5. Тест производительности 4-х изображений –p4
Данный тест запускает несколько раз распознавание изображения image2.jpg и высчитывает на каждом тесте среднее время. Пример теста на Windows 10 конфигурация i7-6700K 4.0ГГц RTX 2080 Super:
ianpr2test.exe -p4 ianpr2dataconfigb4.json
[Test0=0.02923;0.007308]
[Test1=0.02914;0.007286]
[Test2=0.03081;0.007702]
[Test3=0.03170;0.007924]
[Test4=0.03181;0.007952]
[Test5=0.03209;0.008024]
[Test6=0.03173;0.007933]
[Test7=0.03195;0.007987]
[Test8=0.03203;0.008007]
[Test9=0.03193;0.007982]
Y758CC56
6.6. Тест производительности 4-х изображений с 4-мя объектами –-p4o
Тестируем одновременное batchSize = 4 и 4 параллельных объекта. Пример теста на Windows 10 конфигурация i7-6700K 4.0ГГц RTX 2080 Super:
ianpr2test.exe -p4o ianpr2dataconfigb4.json
[Test0=0.05890;0.003681]
[Test1=0.05723;0.003577]
[Test2=0.05673;0.003546]
[Test3=0.05680;0.003550]
[Test4=0.05712;0.003570]
[Test5=0.05701;0.003563]
[Test6=0.05677;0.003548]
[Test7=0.05702;0.003564]
[Test8=0.05709;0.003568]
[Test9=0.05744;0.003590]
Y758CC56
6.7. Тест видео -v
Данные тест, реализованный в функции videoTest(), показывает, как работать с запоминанием номеров. Собственно дополнительно требуется очень мало. Заполняется структура:
iANPR2Setting settings{ 0.25, 12, 60,{"ru"},parallelDll,4,2,6,15,true };
И в процессе распознавания вызывается не только anpr2GetResult(), но и anpr2GetResultMem() для чтения результатов из памяти:
vector<vector<NumberResultMem>> mem = anpr2GetResultMem(ia2);
Видео выдается в окно OpenCV на экран и записывается в файл. Пример вызова:
ianpr2test.exe -v ianpr2dataconfig.json D:\data\auto\video.mp4
6.8. Тест видео с траекторией -vt
Данный пример в функции videoTestTraj показывает, как работать с траекторией. Для этого можно использовать файл pexels-george-morina-5222550 (2160p).mp4 из публичного datasetа:
https://www.kaggle.com/datasets/nimishshandilya/car-number-plate-video
Инициализация траектории при первом кадре:
traj = iANPR2Trajectory(image.rows, image.cols, 10000, 100, 1);
Добавление в объект траектории номеров и дополнительных объектов (в Python пока дополнительные объекты не стоит добавлять):
vector<vector<NumberResult>> numbers = anpr2GetResult(ia2);
vector<vector<ObjectResult>> objects = anpr2GetAddResult(ia2);
vector<NumberResult> tn;
vector<ObjectResult> on;
if (!numbers.empty())
tn = numbers[0];
if (!objects.empty())
on = objects[0];
// Добавить в траекторию
iANPR2TrajectoryProcess(traj, tn, on);
Получение траектории:
vector<TrajectoryResult> tr = iANPR2TrajectoryGetResult(traj);
Вывод траектории на изображение:
int i = 0;
for (auto t : tr)
{
string s = t.strNumber + ":" + t.templateNumber + ":" + to_string(t.weights) + "|ID:" + to_string(t.ID);
cv::Point p = cv::Point(0, 30 * (i + 1));
int baseline = 0;
cv::Size textSize = cv::getTextSize(s, cv::FONT_HERSHEY_SIMPLEX, 1, 1, &baseline);
cv::rectangle(image, Rect(0, 30 * i, textSize.width, 30), cv::Scalar(255, 255, 255), cv::FILLED);
cv::putText(image, s, p, cv::FONT_HERSHEY_SIMPLEX, 1, cv::Scalar(0, 0, 0), 2);
// Рисование самой траектории
if (!t.points.empty())
{
cv::circle(image, t.points[0].point, 5, cv::Scalar(0, 0, 255), 3);
for (size_t j = 1; j < t.points.size(); j++)
{
cv::line(image, t.points[j - 1].point, t.points[j].point, cv::Scalar(0, 0, 255), 3);
cv::circle(image, t.points[j].point, 5, cv::Scalar(0, 0, 255), 3);
}
}
i++;
}
6.9. Тест директории -d
Предназначен для тестирования результатов распознавания (в данном случае визуального). Указывается путь до папки с изображениями и путь для выходных изображений:
ianpr2test.exe -d ianpr2dataconfig.json D:\ianpr2\images\rus\test D:\ianpr2\images\rus\out
6.10. Результаты тестов GPU, CPU и ARM
Тесты с micro моделями ARM в расчете на один кадр:
· Orange PI 3 LTS – 0.655с
· Orange PI 5 – 0.21c
Тесты с nano моделями ARM в расчете на один кадр:
· Orange PI 3 LTS – 0.48с
· Orange PI 5 – 0.17c
Тесты CPU i7-6700K 4.0ГГц в расчете на один кадр:
· detection – 0.058с
· detectionsmall – 0.029c
· detectionmicro – 0.021c
· detectionnano – 0.015c
Указанные тесты получены при одном номере в кадре. Если в кадре несколько номеров, то для них будет тратиться дополнительное время на распознавание. Для примера зависимости можно посмотреть результаты тестирования TRT версии на NVIDIA RTX 2080 Super:
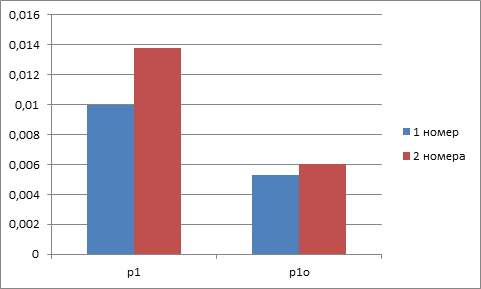
p1 – режим тестирования с 1 объектом распознавания, p1o – с 4-мя объектами распознавания. Видно, что при 2-х номерах в кадре время распознавания увеличивается в 1.5 раза.
7. Примеры Python
Примеры Python предоставлены в первую очередь для демонстрации того, как подключить библиотеку iANPR2 к своему проекту.
ianpr2class.py
В этом файле представлен класс iANPR2, в котором показано, как используясь ctypes подключить все функции из библиотеки. Функции:
# bool iANPR2Version(char* outBuf, int sizeBuf);
self.iANPR2Version = self.lib.iANPR2Version
self.iANPR2Version.restype = ctypes.c_bool
self.iANPR2Version.argtypes = (ctypes.c_char_p,ctypes.c_int,)
# void* iANPR2Init(char* configFile, char*license, int* error);
self.iANPR2Init = self.lib.iANPR2Init
self.iANPR2Init.restype = ctypes.c_void_p
self.iANPR2Init.argtypes = (ctypes.c_char_p,ctypes.c_char_p,ctypes.POINTER(ctypes.c_int),)
# void iANPR2Release(iANPR2Object* object);
self.iANPR2ReleaseP = self.lib.iANPR2ReleaseP
self.iANPR2ReleaseP.restype = ctypes.c_bool
self.iANPR2ReleaseP.argtypes = (ctypes.c_void_p,)
# bool iANPR2SettingsJSON(iANPR2Object object, char* json);
self.iANPR2SettingsJSON = self.lib.iANPR2SettingsJSON
self.iANPR2SettingsJSON.restype = ctypes.c_bool
self.iANPR2SettingsJSON.argtypes = (ctypes.c_void_p,ctypes.c_char_p,)
# int anpr2AddImage(iANPR2Object object, const char* image_bytes, long size_image);
self.anpr2AddImage = self.lib.anpr2AddImage
self.anpr2AddImage.restype = ctypes.c_int
self.anpr2AddImage.argtypes = (ctypes.c_void_p,ctypes.c_char_p,ctypes.c_long,)
# int anpr2inference(iANPR2Object object);
self.anpr2inference = self.lib.anpr2inference
self.anpr2inference.restype = ctypes.c_int
self.anpr2inference.argtypes = (ctypes.c_void_p,)
# int anpr2GetResultJSON(iANPR2Object object, char* outBuf, int sizeBuf);
self.anpr2GetResultJSON = self.lib.anpr2GetResultJSON
self.anpr2GetResultJSON.restype = ctypes.c_int
self.anpr2GetResultJSON.argtypes = (ctypes.c_void_p,ctypes.c_char_p,ctypes.c_int,)
# int anpr2GetAddResultJSON(iANPR2Object object, char* outBuf, int sizeBuf);
self.anpr2GetAddResultJSON = self.lib.anpr2GetAddResultJSON
self.anpr2GetAddResultJSON.restype = ctypes.c_int
self.anpr2GetAddResultJSON.argtypes = (ctypes.c_void_p,ctypes.c_char_p,ctypes.c_int,)
#int anpr2GetResultMemJSON(iANPR2Object object, char* outBuf, int sizeBuf);
self.anpr2GetResultMemJSON = self.lib.anpr2GetResultMemJSON
self.anpr2GetResultMemJSON.restype = ctypes.c_int
self.anpr2GetResultMemJSON.argtypes = (ctypes.c_void_p,ctypes.c_char_p,ctypes.c_int,)
#void* iANPR2Trajectory(int widthImage, int heightImage, int tLimitTime, int tLimitFrames, int typeSpeed);
self.iANPR2Trajectory = self.lib.iANPR2Trajectory
self.iANPR2Trajectory.restype = ctypes.c_void_p
self.iANPR2Trajectory.argtypes = (ctypes.c_int,ctypes.c_int,ctypes.c_int,ctypes.c_int,)
#bool iANPR2TrajectoryRelease(void* object);
self.iANPR2TrajectoryRelease = self.lib.iANPR2TrajectoryRelease
self.iANPR2TrajectoryRelease.restype = ctypes.c_bool
self.iANPR2TrajectoryRelease.argtypes = (ctypes.c_void_p,)
#bool iANPR2TrajectoryProcessJSON(void* object, char* jsonNumbers, char* jsonObjects);
self.iANPR2TrajectoryProcessJSON = self.lib.iANPR2TrajectoryProcessJSON
self.iANPR2TrajectoryProcessJSON.restype = ctypes.c_bool
self.iANPR2TrajectoryProcessJSON.argtypes = (ctypes.c_void_p,ctypes.c_char_p,ctypes.c_char_p,)
#int iANPR2TrajectoryGetResultJSON(void* object, char* outBuf, int sizeBuf);
self.iANPR2TrajectoryGetResultJSON = self.lib.iANPR2TrajectoryGetResultJSON
self.iANPR2TrajectoryGetResultJSON.restype = ctypes.c_int
self.iANPR2TrajectoryGetResultJSON.argtypes = (ctypes.c_void_p,ctypes.c_char_p,ctypes.c_int,)
Для упрощения доступа к этим функциям написаны обертки.
ianpr2test.py (Windows) и ianpr2testL.py (Linux)
В примере реализованы 4 режима – распознавание 1-го изображения, распознавание 4-х изображений, распознавание видео и распознавание видео с траекторией. Пример последовательности действий при распознавании изображений рассмотрен ниже.
Инициализация класса:
import ianpr2class as ia2
ianpr2 = ia2.iANPR2('D:\\ianpr2\\ianpr2CPP\\bin\\ianpr2.dll')
Установка настроек в формате словаря, пример показан тут.
Загрузка файла лицензии:
lic = ""
with open("lic2.key", "r") as f:
for line in f:
lic = line.strip()
break
1) Инициализация объекта:
ianpr2.initiANPR2Object(config,lic)
В классе iANPR2, доступ к Си функции реализован так:
def initiANPR2Object(self,dataConfig,lic) -> bool:
er = ctypes.c_int()
self.ianpr2 = self.iANPR2Init(bytes(dataConfig,'ascii'),bytes(lic,'ascii'),ctypes.byref(er))
if self.ianpr2 != None:
logging.info("Object iANPR2 loaded")
return True
logging.error("Object iANPR2 not loaded: "+ str(er))
return False
2) Загрузка в объект настроек:
ianpr2.setSettings(settings)
В классе iANPR2, доступ к Си функции реализован так:
def setSettings(self, settings) -> bool:
s = json.dumps(settings)
if self.iANPR2SettingsJSON(self.ianpr2,bytes(s,'ascii')):
logging.info("iANPR2Settings installed")
return True
logging.error("iANPR2Settings not loaded")
return False
3) Передача изображения:
ianpr2.putImage(img)
В классе iANPR2, доступ к Си функции реализован так:
def putImage(self, img) -> bool:
img_str = cv2.imencode('.bmp', img)[1].tostring()
res = self.anpr2AddImage(self.ianpr2,img_str,len(img_str))
if res == 0:
logging.info("Image added")
return True
logging.error("Image not added. Error = "+str(res))
return False
4) Вызов распознавания:
ianpr2.inference()
В классе iANPR2, доступ к Си функции реализован так:
def inference(self) -> bool:
res = self.anpr2inference(self.ianpr2)
if res == 0:
logging.info("Inference true")
return True
logging.error("Inference error = "+str(res))
return False
5) Получение результатов:
s = ianpr2.getResult()
В классе iANPR2, доступ к Си функции реализован так:
def getResult(self) -> str:
size = 1000
p = ctypes.create_string_buffer(size)
if self.anpr2GetResultJSON(self.ianpr2,p,size) != 0:
return ""
return p.value.decode("ascii")
После этого можно спарсить JSON и получить результаты, как показано в примере.
8. Inference-сервер
Вы можете реализовать работу с iANPR2 посредством inference-сервера, код которого представлен в папке iANPR2InferenceServer, а также в виде исполняемых файлов:
· iANPR2Server – запускаемый файл сервера в виде консольного приложения;
· iANPR2Client – тестовый клиент на языке C++;
· ianprclient.py – тестовый клиент на Python.
Для старта нужно запустить исполняемый файл iANPR2Server (.exe в Windows) с параметром, например так:
iANPR2Server.exe configinserv.json
Где в качестве параметра передается настроечный файл в JSON формате:
{
"name":"Config for iANPR2 inference server (IIS)",
"versionIIS":1,
"maxImagesInQueue":10,
"gpuObjects":5,
"pathToConfigForLibrary":"D:/ianpr2/ianpr2CPP/bin/ianpr2dataconfig.json",
"detectConfThresh":0.25,
"minPlateHeight":12,
"minPlateWidth":60,
"plateTemplates":["ru"],
"minSymbolsPlate":6,
"maxSymbolsPlate":15,
"port":1234,
"mode":1,
"expandedResult":0
}
Параметры:
name – информационный;
versionIIS – версия формата файла;
maxImagesInQueue – максимальное количество изображений в очереди (если очередь переполнена, то клиенту будет сообщаться об ошибке);
gpuObjects – количество объектов, параллельно обрабатывающих запросы, для версии iANPR2 GPU;
pathToConfigForLibrary – путь до конфигурационного файла для iANPR2;
detectConfThresh – см. структуру iANPR2Setting;
minPlateHeight – см. структуру iANPR2Setting;
minPlateWidth – см. структуру iANPR2Setting;
plateTemplates – перечисление шаблонов номеров, без шаблонов нужно указать [];
minSymbolsPlate – см. структуру iANPR2Setting;
maxSymbolsPlate – см. структуру iANPR2Setting;
port – номер порта, который будет прослушиваться;
mode – режим запуска: 0 – без лога в консоль, 1 – с логом в консоль;
expandedResult – расширенный результат (0 или 1) см. структуру iANPR2Setting.
8.1 REST API
CheckRun
Проверить, запущен ли сервер
http://localhost/CheckRun
Responses
|
Имя |
Описание |
|
200 |
Всегда возвращает OK при доступности сервиса |
ImageInference
Распознать изображения
http://localhost/ImageInference
Request Body
|
Имя |
Обязательный |
Тип |
Описание |
|
Image* |
True |
"application/octet-stream" |
Бинарные данные изображения в формате BMP, JPEG, PNG или TIFF. |
* Передается как multipart data
Responses
|
Имя |
Описание |
|
200 |
JSON строка ImageInferenceResult |
ImageInferenceResult:
|
Имя |
Тип |
Описание |
|
status |
integer |
Результат распознавания: 0 – успешно 1000 – в запросе не было параметра image 1001 – очередь изображений переполнена 1002 – внутренняя ошибка Иное – ошибка от iANPR2 библиотеки (см. код там) |
|
result |
dictionary |
|
|
timePeriod |
unsigned long |
Время операции в миллисекундах |
Пример успешного результата:
{"status":0,"result":{"images":[[{"x":234,"y":286,"width":196,"height":52,"strings":["Y758CC56"],"templates":["base_1"],"confidence":[0.928555],"score":0.908587}]]},"timePeriod":16}
StopServer
Остановить сервер
http://localhost/StopServer
Responses
|
Имя |
Описание |
|
200 |
Всегда возвращает OK при доступности сервиса |
8.2. Примеры C++ и Python
Пример отправки запроса на C++ с использованием Httplib:
void runClient(int port)
{
httplib::Client cli("localhost", port);
ifstream in("image2.jpg", std::ios::binary);
// Читаем всё в массив
std::vector<char> buffer(std::istreambuf_iterator<char>(in), {});
in.close();
httplib::MultipartFormDataItems items = {
{ "image", std::string(buffer.data(), buffer.size()), "image", "application/octet-stream" },
};
for (;;)
{
if (auto res = cli.Post("/ImageInference", items)) {
cout << res->status << endl;
cout << res->get_header_value("Content-Type") << endl;
cout << res->body << endl;
}
else {
cout << "error code: " << res.error() << std::endl;
}
}
}
Пример отправки запроса на Python:
import requests
from requests_toolbelt import MultipartEncoder
import cv2
import time
adress = 'localhost'
port = 1234
img = cv2.imread("image2.jpg")
img_str = cv2.imencode('.jpg', img)[1].tobytes()
sess = requests.Session()
while True:
t1 = time.time()
multipart_data = MultipartEncoder(
fields={
'image': ('image', img_str, 'application/octet-stream')
}
)
x1 = sess.post(
"http://{}:{}/ImageInference".format(adress,port),
data = multipart_data,
headers={'Content-Type': multipart_data.content_type}
)
print(x1.text)
9. Получение движков TensorRT из ONNX моделей
Для получения движков TensorRT нужно использовать утилиту, идущую в составе TensorRT (Windows или Linux) – trtexec. В Windows она находится в каталоге bin распакованного пакета. В Ubuntu, после установки пакета, ее можно найти так:
locate trtexec
Но обычно он располагается по адресу:
/usr/src/tensorrt/bin/trtexec
В составе iANPR 2 две модели – детектирования номеров и классификации. Модель детектирования – это YOLOX модель, которая поставляется в двух ONNX файлах:
detection300524.onnx – модель с batchSize = 1
detection300524_b4.onnx – модель с batchSize = 4
Команды для получения TensorRT моделей детектирования номеров такие:
trtexec --onnx=detection300524.onnx --workspace=3000 --fp16 --saveEngine=detection300524.engine
trtexec --onnx=detection300524_b4.onnx --workspace=3000 --fp16 --saveEngine=detection300524_b4.engine
Команды для получения TensorRT модели детектирования символов:
trtexec --onnx=symbolsmodel28092024_d.onnx --workspace=3000 --fp16 \
--saveEngine=symbolsmodel28092024.engine --minShapes=images:1x3x320x320 \
--optShapes=images:4x3x320x320 --maxShapes=images:8x3x320x320
Модель классификации одна в файле model.onnx. Команда:
trtexec --onnx=classification.onnx --workspace=1000 --fp16 --saveEngine=classification041024.engine \
--precisionConstraints=prefer --minShapes=input_1:1x28x28x1 --optShapes=input_1:8x28x28x1 \
--maxShapes=input_1:32x28x28x1
Имена движков необязательны, но если вы используете другие, тогда вам надо менять конфигурационные файлы ianpr2dataconfig.json и ianpr2dataconfigb4.json.
Для небольшого ускорения движков вы можете использовать ключ
--useSpinWait, но это может привести к большей нагрузке на CPU.
10. Рекомендации к использованию
Основные рекомендации для версии TRT (TensorRT):
1. Инициализируйте объект iANPR2Object один раз, поскольку время на инициализацию занимает несколько секунд.
2. По возможности используйте несколько параллельных объектов распознавания, это требует больше GPU памяти, но за счет асинхронности скорость может повышаться больше, чем в 2 раза.
3. Если вам нужен максимум скорости, то помимо параллельных объектов используйте пакетное распознавание, для которого требуется специальный движок TensorRT.
4. Для повышения качества распознавания используйте объединение результатов с нескольких кадров. Это можно сделать или с помощью функции внутренней памяти, траектории или самостоятельно.
5. Для отброса ложных срабатываний повысьте порог detectConfThresh и увеличьте минимальное значение ширины и высоты номера. Также можете увеличить значения memoryNumberRepeat для накапливаемого распознавания.
6. Используйте организационные возможности повышения качества распознавания – размещайте камеру так, чтобы не допускать наклона символов на изображении.
Основные рекомендации для версии CPU:
1. Использование параллельных объектов может сильно нагрузить процессор (до 100%) при небольшом увеличении быстродействия. При виртуальном CPU быстродействие даже снизится.
Основные требования к алгоритму распознавания:
· Номер автомобиля должен размещаться в кадре целиком.
· Угол вертикального наклона видеокамеры не более 40°.
· Угол наклона вглубь – не более 30°.
· Изображения должны быть четкими и не размытыми.
· Размер символов для надежного распознавания должен быть не менее 14 пикселей в высоту.
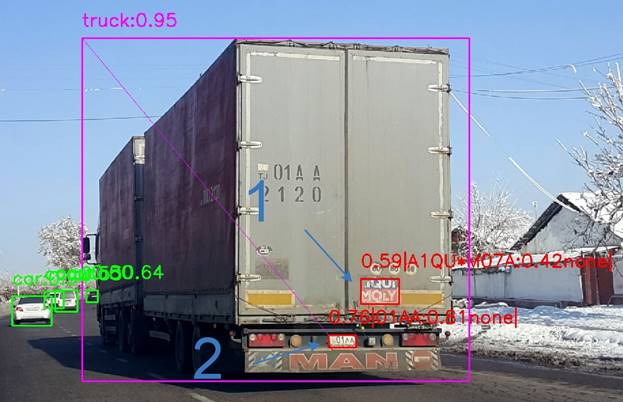
При получении результатов для фильтрации номеров пользуйтесь как вероятностью номера при детектировании score, так и вероятностью символов номера confidence. Так в примере указанном ниже:
1. Ложный номер с низкой детектированной достоверностью 0.59 (в принципе допустима), однако низкой достоверностью символов 0.42 и не найденным шаблоном – можно отбросить.
2. Погнутый номер. Достоверность детектирования нормальна – 0.76, как и символов 0.81. Но шаблон не найден, так как не найдены символы погнутой части номера.
Пример хорошего распознавания:

Да score детектирования не сильно высок, но допустим. Но вот confidence хорош. Как и найден шаблон номера.
11. Результаты тестирования
Мы провели тестирование и сравнили результаты распознавания с предыдущей версией.
Наши выборки для тестирования:
· RUS1 – выборка для распознавания номеров России, которая изначально использовалась для тестирования iANPR1;
· KAZ1 – выборка для распознавания номеров Казахстана, которая изначально использовалась для тестирования iANPR1 – однострочные номера;
· RUS2 – вторая выборка для распознавания номеров России (ее не было при разработке iANPR1);
· KG – выборка для распознавания номеров Кыргызстана;
· KAZ2 – выборка для распознавания номеров Казахстана, в том числе содержащая двухстрочные номера;
· BY – выборка для распознавания номеров республики Беларусь;
· AM – выборка для распознавания номеров Армении;
· MD – выборка для распознавания номеров Молдовы;
· AZ – выборка для распознавания номеров Азербайджана;
· TJ – выборка для распознавания номеров Таджикистана;
· UZ – выборка для распознавания номеров Узбекистана;
· GR – выборка для распознавания номеров Грузии.
В таблице ниже представлены результаты тестирования. Достоверность результатов вычисляется по следующему показателю:
![]()
где T – правильно распознанные номера (строка номера полностью совпадает), A – все номера.
Достоверность распознавания не точно соответствует качеству для конкретной страны, так как выборки отличаются друг от друга, и одни могут быть сложнее других, а именно – серьезный поворот и наклон номера, большое изображение и маленький номер, что затрудняет детектирование.
Small, micro и nano в тестировании CPU показывает используемую модель детектирования номера. К примеру, в выборке KAZ1 при уменьшении модели до small качество немного выросло, что говорит, что на изображениях меньше маленьких номеров, чем, к примеру, в KAZ2. Чем меньше модель – тем хуже распознаются маленькие номера просто из-за изменения размера исходного изображения.
При этом результаты ложных срабатываний – обнаружение номера там, где его не было – не учитывались. Но в версии iANPR 2 они существенно ниже, чем в iANPR 1.8.
Таблица. Достоверность распознанных номеров
|
|
iANPR 1.8 |
iANPR 2.5 TensorRT |
iANPR 2.5 CPU |
iANPR 2.5 CPU (small) |
iANPR 2.5 CPU (micro) |
iANPR 2.5 CPU (nano) |
|
RUS1 |
0.614 |
0.930 |
0.930 |
0.925 |
0.910 |
0.849 |
|
KAZ1 |
0.479 |
0.939 |
0.946 |
0.944 |
0.937 |
0.869 |
|
RUS2 |
0.547 |
0.946 |
0.942 |
0.923 |
0.916 |
0.884 |
|
KG |
- |
0.8744 |
0.8474 |
0.8084 |
0.7794 |
0.7244 |
|
KAZ2 |
- |
0.909 |
0.890 |
0.868 |
0.828 |
0.773 |
|
BY |
- |
0.8802 |
0.8652 |
0.8562 |
0.8262 |
0.7932 |
|
AM |
- |
0.9273 |
0.9163 |
0.9033 |
0.8823 |
0.8523 |
|
MD |
- |
0.9381 |
0.9331 |
0.9081 |
0.8791 |
0.8191 |
|
AZ |
- |
0.925 |
0.904 |
0.866 |
0.804 |
0.753 |
|
TJ |
- |
0.8774 |
0.8594 |
0.8014 |
0.7484 |
0.6544 |
|
UZ |
- |
0.8384 |
0.8024 |
0.7604 |
0.6984 |
0.6284 |
|
GR |
- |
0.9031 |
0.8921 |
0.8761 |
0.8671 |
0.8491 |
1 - результаты тестирования не учитывали различия 0 (ноль) и O (буква);
2 – в выборке были символы кириллицы, которые не поддерживаются;
3 – в выборке нет символов нелатинского алфавита;
4 – у KG, TJ, UZ меньшая достоверность из-за более сложной выборки и низкого качества номеров, и особенностей номеров, в частности символов региона, которые в то время, как основные символы достаточны для прочтения, очень маленькие и сливаются.
12. Возможные ошибки
Внутренние возвращаемые ошибки описаны в iANPR2Errors.h.
IA_OBJECTNULL = -1,
iANPR2 объект пустой.
IA_OK = 0,
Действие завершено успешно.
IA_TRTENGINELOADERROR = 1,
Невозможно загрузить один из движков TensorRT, указанных в конфигурации.
IA_COPYTOGPUMEMERROR = 2,
Ошибка копирования в GPU память.
IA_INFERENCEFAIL = 3,
Ошибка распознавания (инференс) нейросети.
IA_GETFROMGPUERROR = 4,
Ошибка получения результатов с GPU на CPU.
IA_CONFIGNOTFOUNDORDAMAGED = 5,
Не найден конфигурационный файл или содержит ошибки.
IA_NOIMAGES = 6,
Переданные Mat на распознавание – пустые.
IA_IMAGENOT8U = 7,
Изображения неправильного формата – не 3-х канальные 8 битные.
IA_TEMPLATELOADFALSE = 8,
Ошибка при загрузке файла шаблонов номеров.
IA_LICENSENULL = 9,
Буфер с лицензией пуст.
IA_LICENSEERROR = 10,
Невозможно расшифровать лицензию.
IA_ADDIMGCANNTDECODE = 11,
Невозможно декодировать массив байт в изображение.
IA_ADDIMGBUFFERFULL = 12,
Невозможно добавить изображение в буфер – он полон.
IA_ADDIMGNOTEQUALBATCH = 13,
Количество изображений в буфере не соответствует batchSize.
IA_OUTJSONBUFFERSMALL = 14
Выходной буфер для JSON слишком мал.
IA_OPENVINOLOADERROR = 15
OpenVINO не смогло загрузить одну из моделей.
IA_NEEDONLYBATCHSIZE1 = 16
В данном режиме поддерживается только batchSize == 1.
Внешние возможные ошибки описаны ниже:
1. cudaErrorInsufficientDriver = 35
Если в процессе тестирования утилиты в консоли отображается ошибка 35, то ее инициирует CUDA. Она означает, что графический драйвер старее, чем эта версия TensorRT и нуждается в обновлении. Подробнее об ошибках, инициируемых CUDA можно почитать тут.
2. Сообщение от CUDA (Не влияет на работу):
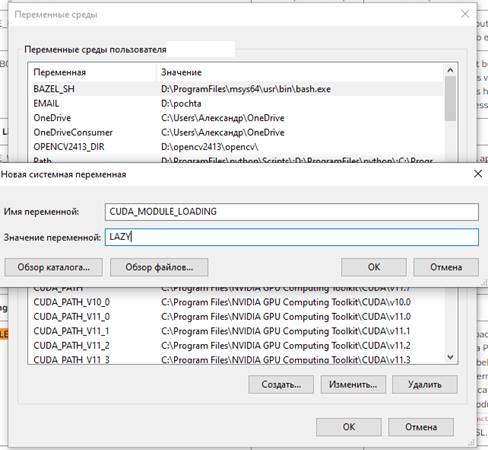
CUDA lazy loading is not enabled. Enabling it can significantly reduce device memory usage. See `CUDA_MODULE_LOADING` in https://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#env-vars
Определяется переменной окружения CUDA_MODULE_LOADING. Указывает режим загрузки модуля для приложения. Если установлено значение EAGER, все ядра из файла cubin, fatbin или PTX полностью загружаются при соответствующем вызове API cuModuleLoad*. Это то же поведение, что и во всех предыдущих выпусках CUDA. Если установлено значение LAZY, загрузка определенного ядра задерживается до момента извлечения дескриптора CUfunc с помощью вызова API cuModuleGetFunction. Этот режим позволяет снизить начальную задержку загрузки модуля и уменьшить начальное потребление памяти устройства, связанного с модулем, за счет более высокой задержки вызова API cuModuleGetFunction. Поведение по умолчанию — LAZY в Linux и EAGER в Windows и WSL. Поведение по умолчанию может измениться в будущих выпусках CUDA. В версиях CUDA ниже 11.6 это сообщение может выдаваться в любом случае. В Windows Можно удалить, установив переменную окружения:
3. Сообщение TensorRT
Using an engine plan file across different models of devices is not recommended and is likely to affect performance or even cause errors.
Файл был создан для видеокарты другого типа.
4. CUDA_ERROR_ILLEGAL_ADDRESS
Такая ошибка может свидетельствовать о попытке использовать движок TensorRT созданный для Linux под Windows и наоборот. К сожалению, текущая версия TensorRT чувствительна к операционной системе платформы.
5. Ошибка OpenVINO
OSError: libopenvino.so.2330: cannot open shared object file: No such file or directory
Настройки окружения Linux сбросились, возможно после перезагрузки. Надо установить заново с помощью:
source /opt/intel/openvino_2024/setupvars.sh
Желательно прописать в автозагрузку.